2025

Tok-Arm: Multiple DOF Robotic Arm for Tokamak
Entrant
Guizhou University
Category
Robotics - Industrial Robots
Client's Name
Country / Region:
China
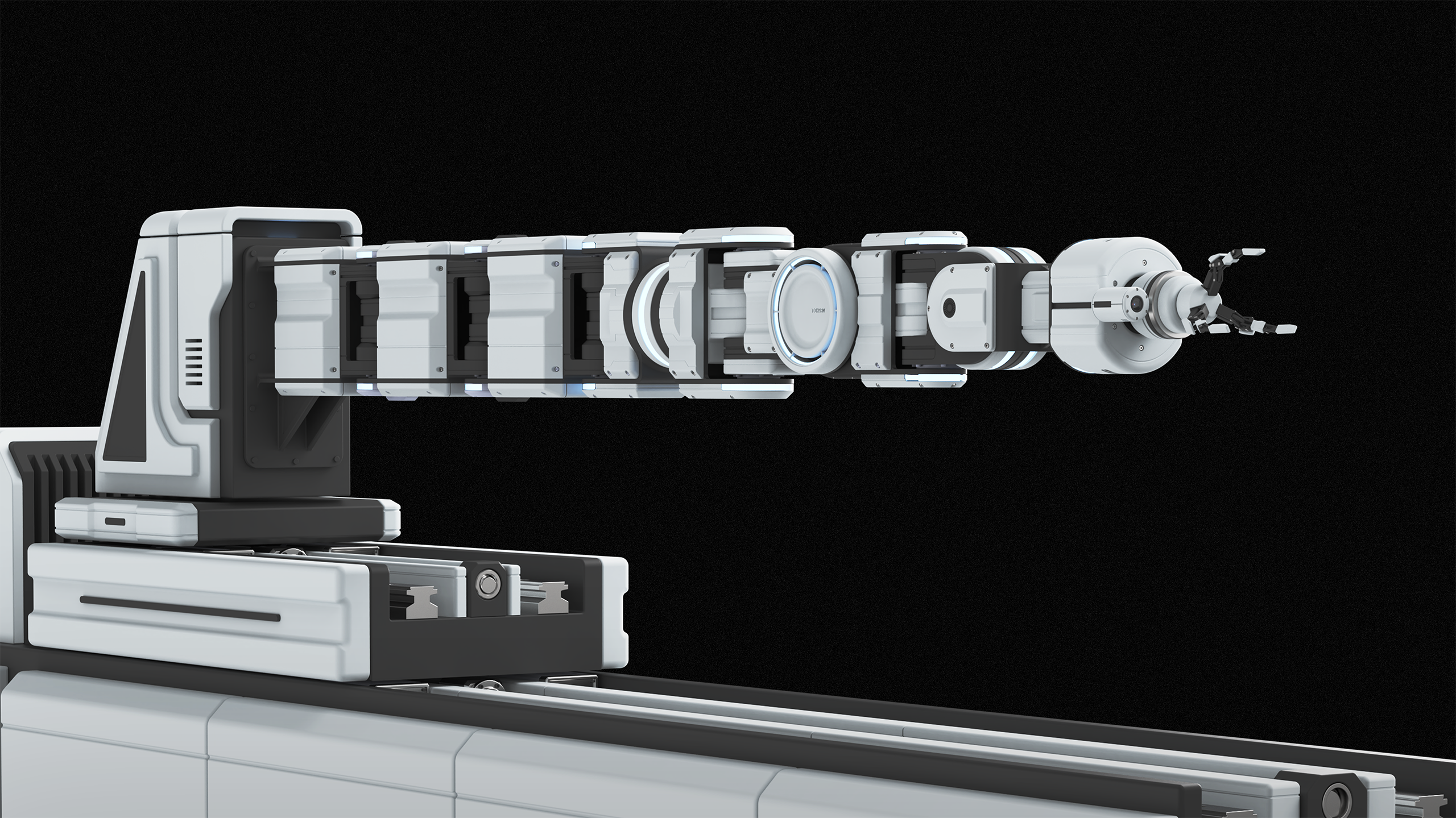
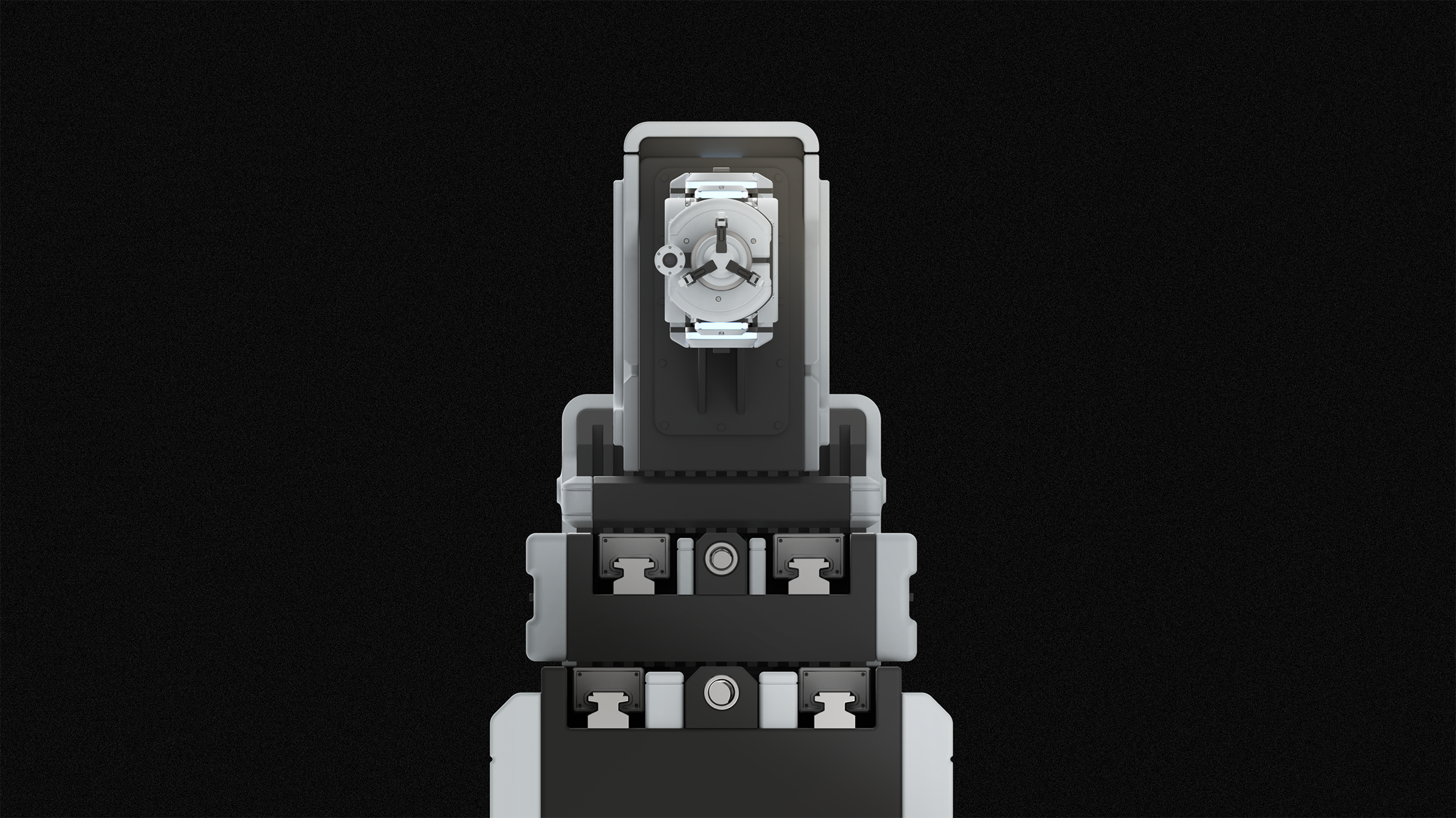
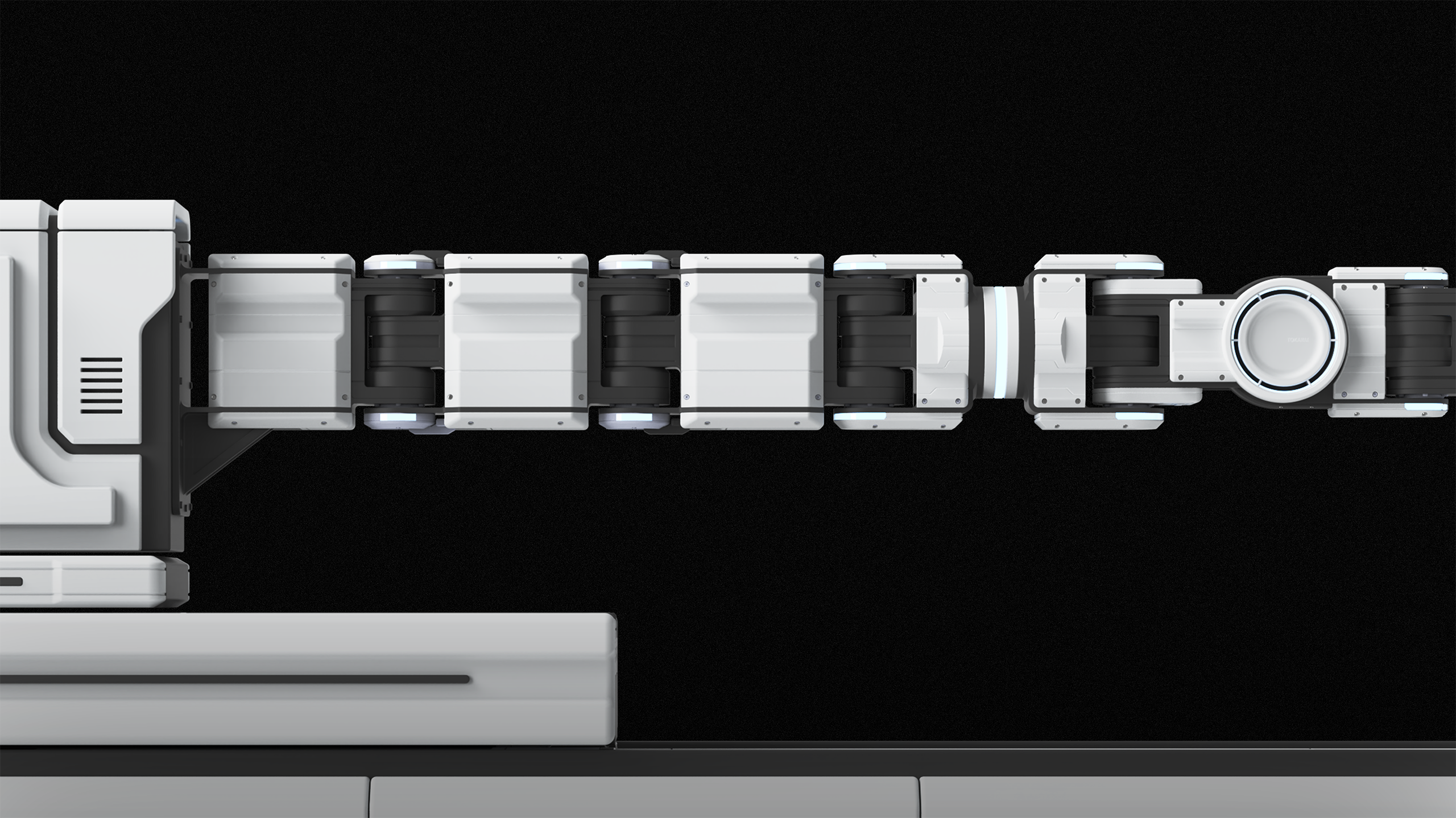
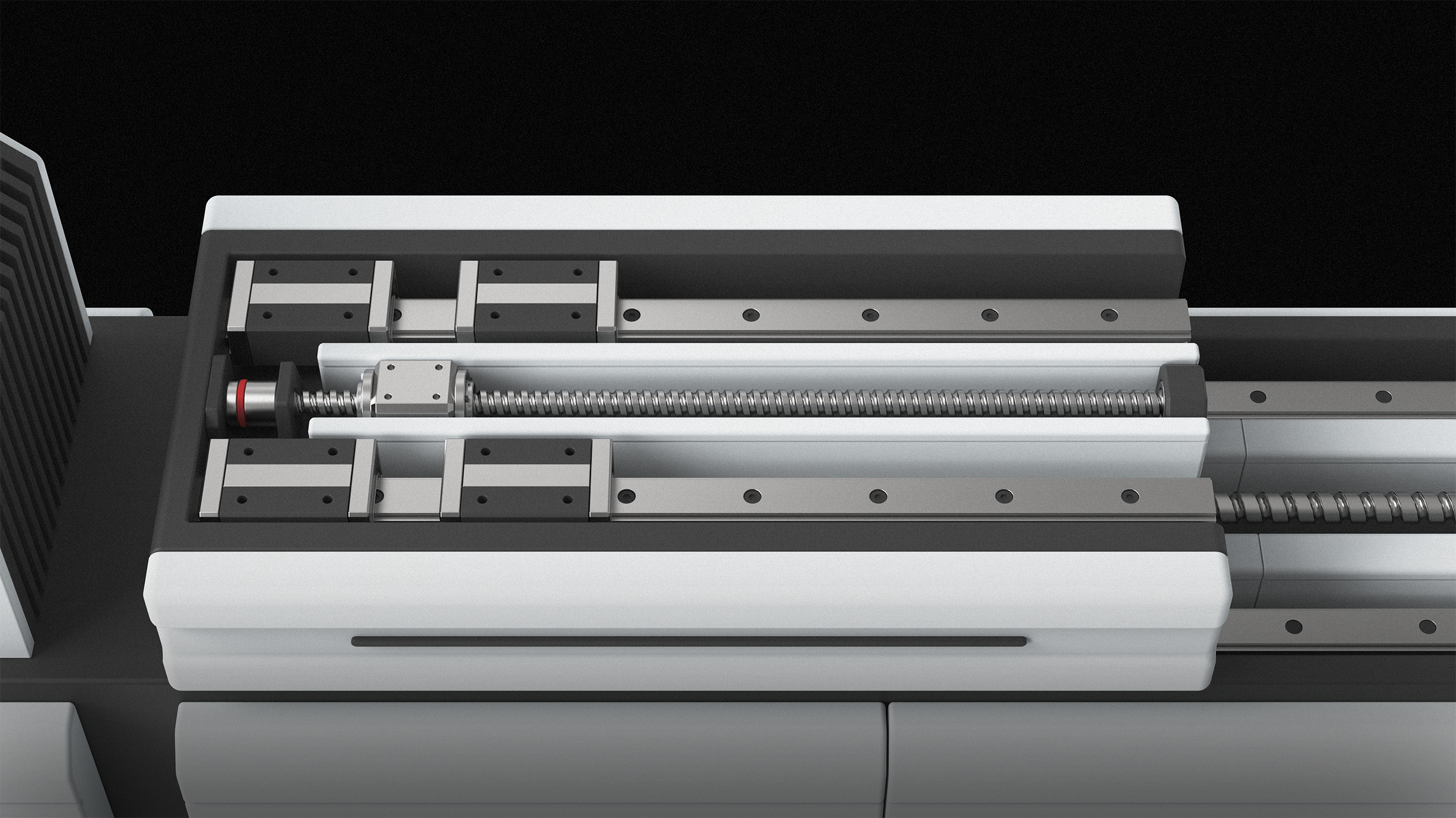
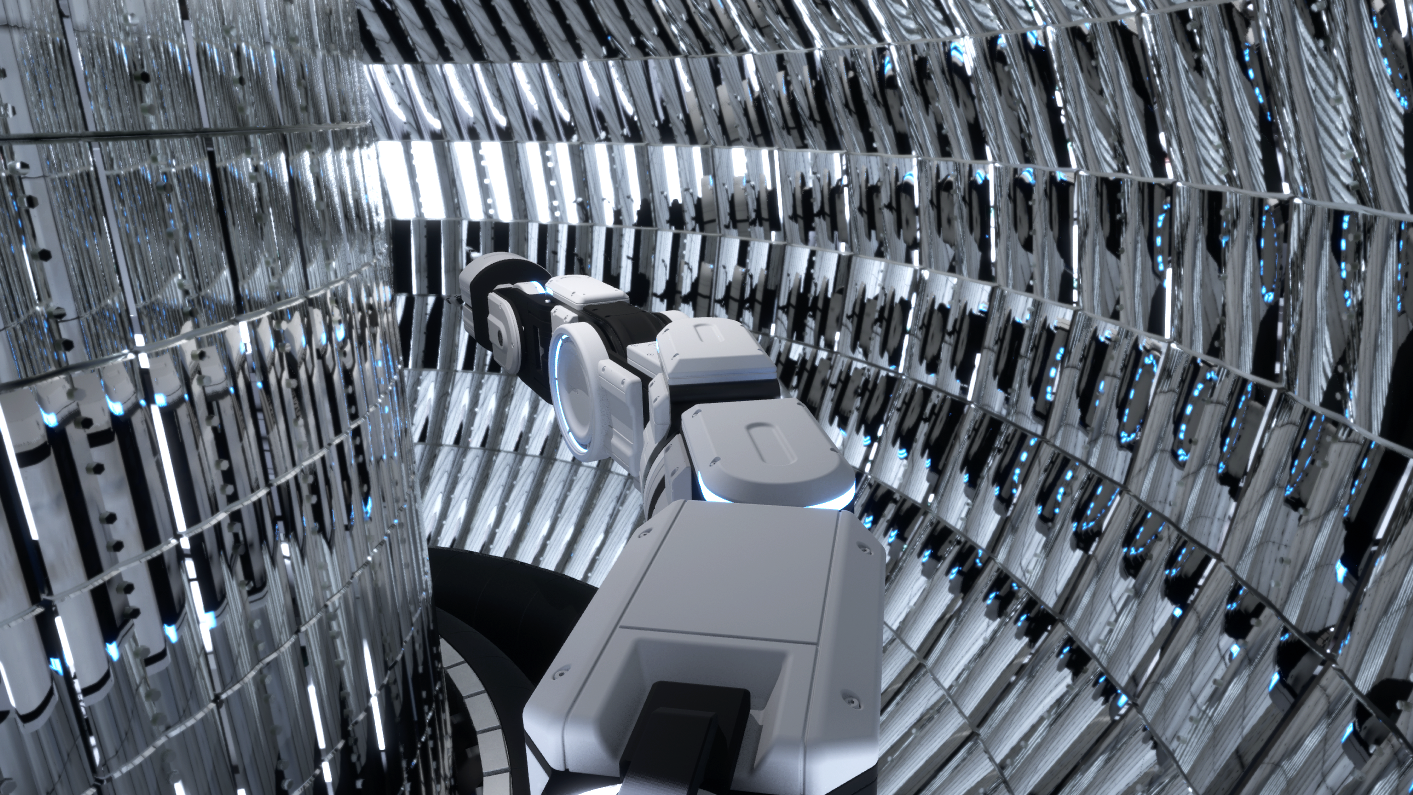
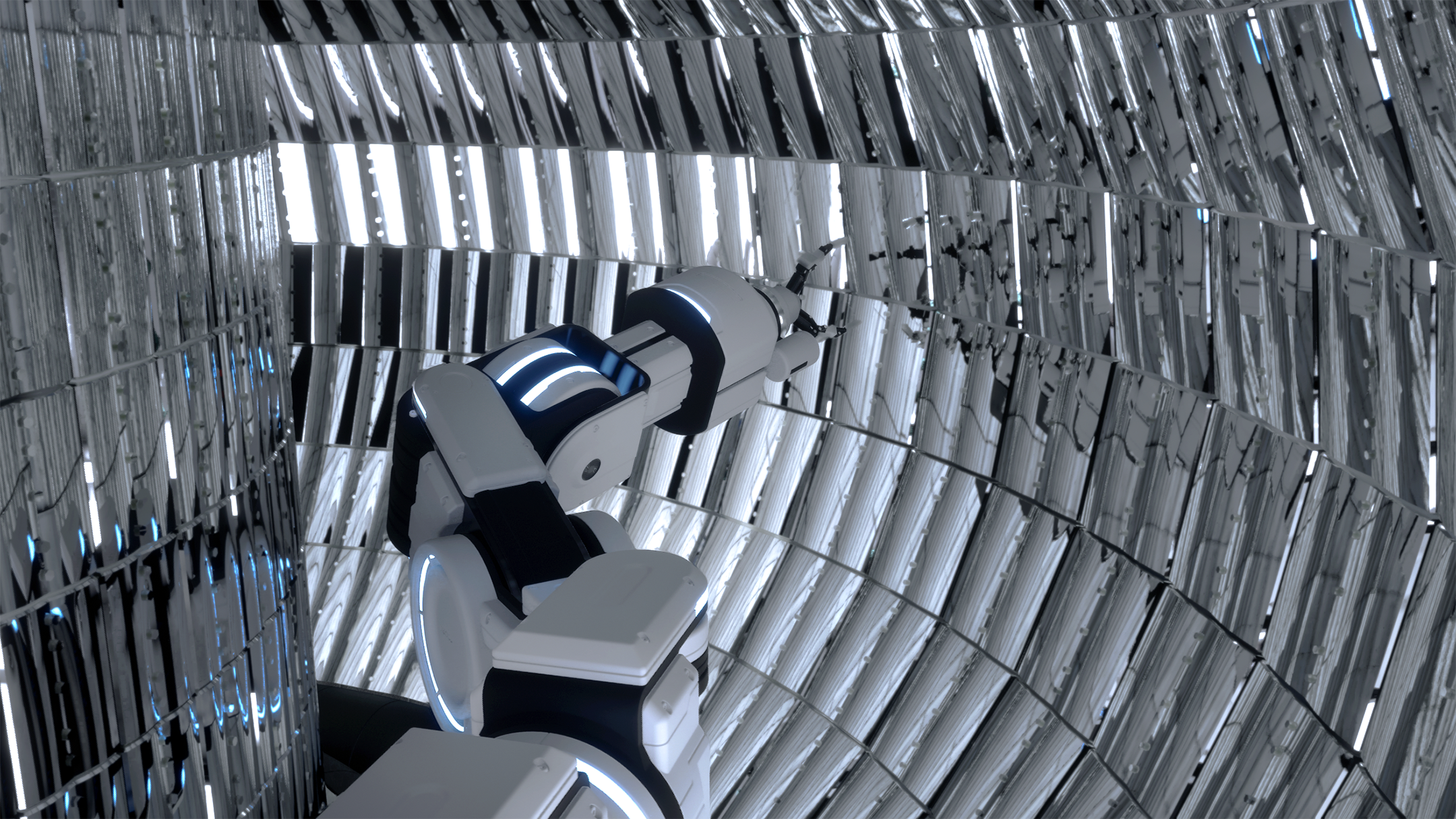
The operating environment of the tokamak nuclear fusion device is extreme, with high temperature and strong radiation inside the chamber. The first wall material of the device is prone to damage during the nuclear reaction process. In response to the difficulty of manual operation and maintenance, we have designed a remote operation and maintenance robot, which consists of a set of remote operation robotic arm and its carrying system. The robotic arm body is composed of ten degrees of freedom joints, which have high flexibility and can reach various parts inside the chamber for operation. The end is a multi-purpose interface that can carry different equipment, such as drill bits, welding tools, multifunctional fixtures, etc., to meet different operational requirements. In terms of structure, it adopts the form of structural steel skeleton and engineering plastic shell. Each joint can be easily disassembled and repaired independently, while giving it a clean and tough appearance, A dual planetary reduction integrated servo motor is used between the joints to ensure structural strength and end stability. At the same time, a digital twin platform is developed to provide real-time control interface, allowing staff to carry out remote and refined maintenance work. The virtual real linkage ensures the smooth operation of the tokamak device




Credits



